ؤْµؤ®”ا°خ»ضأ: ضذ‡ّه‘‰؛¾W > ظYسچضذذؤ > صخؤ
ؤْµؤ®”ا°خ»ضأ: ضذ‡ّه‘‰؛¾W > ظYسچضذذؤ > صخؤ|
½üؤêپي£¬½ف±ھآ·»¢Œ¢آ·»¢·ض»¯é”ˆ„ظ،¢°l¬F،¢ذlت؟ب‚€ئ·إئ£¬¼سةد½ف±ھک‹³ةثؤ‚€ئ·إئ،£½ف±ھتاز»‚€دàŒ¦ھڑء¢µؤئ·إئ£¬¾ك‚نإــ‡»ùزٍ،£ڈؤëٹ„س»¯كM³جپيصf£¬½ف±ھ×كشع×îا°ءذ£¬2025ؤê؛َ£¬½ف±ھئ·إئ•×ƒ³ة¼ƒëٹµؤئ·إئ£¬زش؛َثùحئ³ِµؤـ‡ذح¶¼Œ¢تا¼ƒëٹـ‡،£ 2023ؤê10شآ20بص£¬شعµعت®ز»Œأئûـ‡إch¾³„“ذآص“‰¯ôكµعت®خهŒأب«اٍئûـ‡®aکI·ه•ةد£¬½ف±ھآ·»¢ضذ‡ّ×ش„سٌ{ٌ‚¼°ضاؤـفoضٌْ{ٌ‚¸±؟‚²أذد±َض¸³ِ£¬®”ا°ضاؤـٌ{ٌ‚سذژ×´َح´üc£¬ئنضذƒة´َح´ücتاشعکO¶ثˆِ¾°دآثùأوإRµؤجô‘ً£¬زش¼°بث™C¹²ٌ{†–î}£¬ك@ذ©ح´ücŒ§ضآشS¶à؟ح‘ô²»¸زت¹سأضاؤـٌ{ٌ‚،£ ذد±َض¸³ِ£¬زھ½â›Q®”ا°ضاؤـٌ{ٌ‚ثù´وشعµؤ†–î}£¬جلةَwٍ£¬ذèزھ´َ¼ز´ٍئئ¸ôéu£¬ز»ئً°رضاؤـٌ{ٌ‚صû‚€دµ½yµؤَwٍ×ِµأ¸ü؛أ،£  ذد±َ | ½ف±ھآ·»¢ضذ‡ّ×ش„سٌ{ٌ‚¼°ضاؤـفoضٌْ{ٌ‚¸±؟‚²أ زشدآéرفضvƒببفصûہي£؛ زشا°½ف±ھآ·»¢تاƒة‚€ھڑء¢µؤکث£¬¶ّ¬Fشعآ·»¢ك@‚€إئ×س±»بُ»¯£¬·ض»¯é”ˆ„ظ،¢ذlت؟،¢°l¬Fب‚€إئ×س£¬½ف±ھ„tتادàŒ¦ھڑء¢µؤئ·إئ،£ڈؤëٹ„س»¯كM³ج؟´£¬½ف±ھ×كشعا°ءذ£¬2025ؤê؛َ½ف±ھŒ¢•×ƒ³ة¼ƒëٹµؤئ·إئ£¬زش؛َحئ³ِµؤثùسذـ‡ذح¶¼تا¼ƒëٹـ‡،£آ·»¢ز²•شعëٹ„س»¯آ·³جةدز»²½ز»²½×ك£¬•ڈؤ2025ؤêé_ت¼حئ³ِثؤ؟ëٹآ·»¢ـ‡ذح£¬·ضشعآ·»¢ب‚€×سئ·إئدآ،£ ضاؤـٌ{ٌ‚َwٍ·ضخِ شعخز‚ƒةددآ°àµؤآ·ةد£¬سذشS¶àضاؤـٌ{ٌ‚سأ‘ôَwٍˆِ¾°£¬ز»تاح£ـ‡£¬¶تاشعذذٌ‚ك^³جضذسذ¸كثظ؛ح³ا…^µب²»ح¬ˆِ¾°،£ دآˆDخز‚ƒض®ا°ثù×ِµؤشu¹ہ£¬ABCDE´ْ±ي²»ح¬؟ح‘ô،£ك@تاز»‚€ب«اٍ±بف^£¬سذضذ‡ّ،¢ڑWضق،¢أہ‡ّ،£خز‚ƒشعضذ‡ّµؤ¹¦ؤـ¸‚ظگسْرفسْءز£¬¶¼دëزھ×î¸كëAµؤ¹¦ؤـ،£ 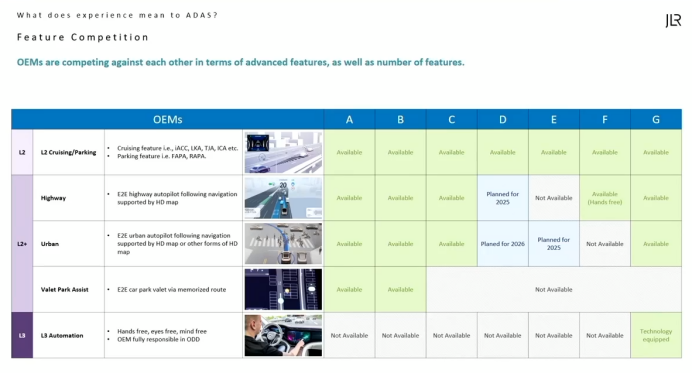 ˆDش´£؛رفضv¼خظeثط²ؤ دآˆD™MفSتا•régفS£¬؟vفSتاَwٍفS،£دآأوµؤüc´ْ±يشع³ُت¼µؤ•r؛ٍ£¬¹¦ؤـَwٍ²»تا؛ـ؛أ،£ëSضّ•régµؤحئرف£¬ـ›¼µؤµü´ْ£¬َwٍ²»”àحùةدإہة،£µ½ءثؤ³‚€ücَwٍµ½ز»¶¨³ةتى¶ب£¬اْ¾€é_ت¼ع…سعئ½¾ڈ،£NOA highway؛حNOA urbanز²؟ةزشك@کس½â×x£¬ض»تا•régةدµؤ³ُت¼ücسذثù²»ح¬،£ 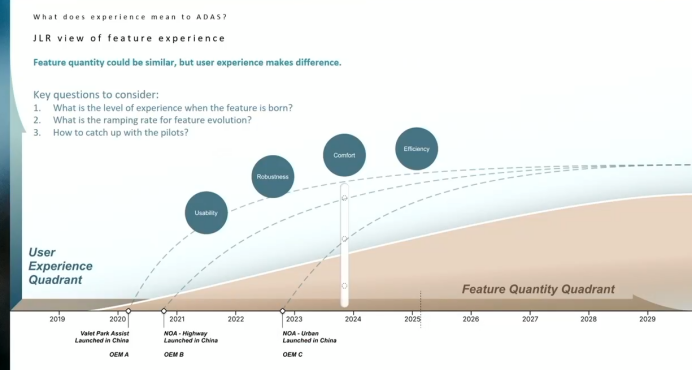 ˆDش´£؛رفضv¼خظeثط²ؤ ×÷éز»¼زض÷™CڈS£¬زھةدذآµؤ¹¦ؤـ•؟¼‘]ب‚€†–î}،£ز»تا¹¦ؤـةد¾€µؤ•r؛ٍئًücسذ¶à¸ك£¬بç¹ûتا½èضّا°بثµؤ½›ٍ£¬ؤائًüc•دàŒ¦ف^¸ك£¬ةدˆD°×¾€ةدµؤب‚€üc¾حتا¹¦ؤـµؤئًüc،£¶تاإہµؤثظ¶بسذ¶à؟ى£¬بç¹û¸‚ ژŒ¦تضإہµؤ؛ـ؟ى£¬ؤم؛ـآ£¬„ف±ط•شى³ة²î¾àش½پيش½´َ£¬زھ؟¼‘]شُکس°راْ¾€µؤذ±آت×ِµؤ±بئنثûبث¸ü¸ك،£بتاشعشِ¼سح¶بë•r£¬Œ¦تض²¢›]سذح£ض¹£¬بç؛خعs³¬¸‚ ژŒ¦تض،£ك@ب‚€؛ثذؤ†–î}تاجلةضاؤـٌ{ٌ‚َwٍµؤêPوIüc،£ ضاؤـٌ{ٌ‚َwٍح´üc خز‚ƒ¸ù“Œ¦ضاؤـٌ{ٌ‚ہي½â³ج¶بµؤ²»ح¬Œ¢؟ح‘ô·ضéبîگ،£µعز»îگتاOver-trust users£¬صJéضاؤـٌ{ٌ‚؟ةزشحê³ةز»اذ£¬ةدـ‡؛َضاؤـٌ{ٌ‚ؤـ‰ٍ½â›Qثùسذ†–î}£¬سأ‘ô؟ةزش×ِ„eµؤتآ،£µع¶îگتاCautious users£¬Œ¦سعضاؤـٌ{ٌ‚دµ½yسذز»¶¨ءث½â£¬ضھµہثüتافoضْدµ½y£¬ذèزھبثب¥±O¹ـh¾³£¬بثزھéتآ¹تط“طں،£µعبîگتاNegative users£¬²»ذإبخضاؤـٌ{ٌ‚دµ½y£¬²»دëت¹سأ،£ 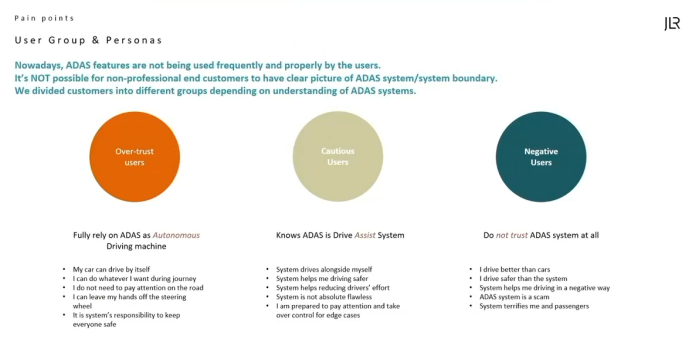 ˆDش´£؛رفضv¼خظeثط²ؤ ضاؤـٌ{ٌ‚ك^³جضذ½o•سِµ½ضT¶à†–î}،£±ببçشعکO¶ثˆِ¾°دآ£¬³ا…^µہآ·ڈحës£¬·ا™C„سـ‡´©ثَ£¬Œ¦ضاؤـٌ{ٌ‚¶ّرشتاز»‚€کO´َµؤجô‘ً،£´ثح⣬´َ¼زد£حûشعé_ـ‡µؤ•r؛ٍبç¹ûٌ{ٌ‚†T¸ةîAدµ½y£¬دµ½y؟ةزش²»حث³ِ£¬µ«؛ـ¶àدµ½yشع™Mدٍ؟طضئµؤ•r؛ٍ£¬ض»زھةشخ¢êز»دآ·½دٍ±P£¬³¬ك^ز»¶¨ضµ£¬دµ½y¾ح•×ش„سحث³ِ£¬حêب«½»½oبث؟طضئ£¬زٍ´ثبث™C¹²ٌ{تاذèزھ½â›Qµؤ†–î}،£ك€سذضاؤـٌ{ٌ‚سذ•r؛ٍ•ح»ب»¼±„x£¬…s²»اه³شزٍ،£ زشةد†–î}•Œ§ضآOver-trust users؛حCautious usersقD׃éNegative users£¬×î½K²»¸زت¹سأضاؤـٌ{ٌ‚دµ½y،£ضاؤـٌ{ٌ‚دµ½yµؤ½¨ء¢ذèزھ؛ـéL•rég£¬ز»µ©پGت§ذإبخ£¬¾ح؛ـëyشظحى»طسأ‘ô،£خز‚ƒدë؟´µ½µؤˆِ¾°تاسأ‘ô»طڑwہيذش£¬Œ¦ضاؤـٌ{ٌ‚دµ½yسذص´_µؤصJ×R£¬ش¸زâت¹سأ،£ ®”ا°µؤتذˆِت®·ضڈحës£¬ةو¼°µ½°²ب«¹¦ؤـ،¢ذذٌ‚¹¦ؤـ،¢ح£ـ‡¹¦ؤـ،£ئنضذبشب»´وشعضT¶à†–î}،£±ببçسأؤؤ‚€¹¦ؤـكMذذ„xـ‡£¬سذذ©¹¦ؤـ½ذAEB£¬سذذ©¹¦ؤـ½ذlose bµؤAEB£¬„xـ‡µؤ•r؛ٍتاؤؤز»‚€شعك\ذذتا²»´_¶¨µؤ،£شS¶à¹¦ؤـµؤأû×ضسذثù…^„e£¬µ«ئن…^„e¾كَwتات²أ´،¢بç؛خَw¬F£¬Œ¦سعخز‚ƒ¶ّرشتا²»؟ةضھµؤ،£ ك@Œ¦½K¶ثسأ‘ô¶ّرشتاز»‚€؛ـ´َµؤح´üc،£×÷é·اŒ£کIٌ{ٌ‚†T£¬سأ‘ôںo·¨ہي½âك@ذ©¹¦ؤـµؤأ؟ز»‚€¼ڑ¹؛ح…¢”µ،£±ببçAEBشعؤ³‚€ثظ¶بض®ةد²»•×ِfull break£¬زٍéزھ؟¼‘]ـ‡µؤ·€¶¨ذش£¬·ہض¹·ـ‡£¬µ«·اŒ£کIµؤسأ‘ô²»ضھµہك@‚€ثظ¶بµؤ¾كَw”µضµتا¶àةظ،£ك€سذACCبç¹û¸ْح£ىoض¹ـ‡فv£¬تاسذثظ¶بةددقµؤ£¬µ«´َ²؟·ضبثز²²»ضھµہك@‚€ثظ¶بتا¶àةظ،£ ح¬کسµؤ¹¦ؤـ£¬شS¶à¶¨ءxتا²»ح¬µؤ،£±ببç‚÷½yµؤLKAتاإِµ½ـ‡µہ¾€ءث¾حژحؤمہ»طپي£¬ز²سذذ©بث·QLKAéـ‡µہ¾سضذ،£´َ¼زŒ¦سعح¬ز»¹¦ؤـ£¬ح¬کسأû×ضµؤ–|خ÷¶¨ءx¶¼²»ح¬£¬ك@•×Œٌ{ٌ‚†T®aةْشS¶àہ§»َ،£زشةدہ§»َہ§ëy•شى³ةژ×·N²»ح¬µؤ†–î}،£µعز»·Nتاح»ب»„xـ‡£¬±»؛َـ‡×·خ²،£µع¶·Nتابث™C½»»¥ŒسأوسذشS¶à²»ز×ہي½âµؤˆDکث،£µعب·NتاAEBص`س|،£ دآˆDءذإeءثز»ذ©·اŒ£کIٌ{ٌ‚†Tںo·¨إھاه³µؤك…½ç£¬ؤؤذ©اé›r؟ةزشسةدµ½y½â›Q£¬ؤؤذ©ںo·¨سةدµ½y½â›Q£¬ذèزھشِ¼س×¢زâء¦،£خز‚ƒذèزھژحضٌْ{ٌ‚†T½¨ء¢¸ü؛أµؤذإذؤ،£ 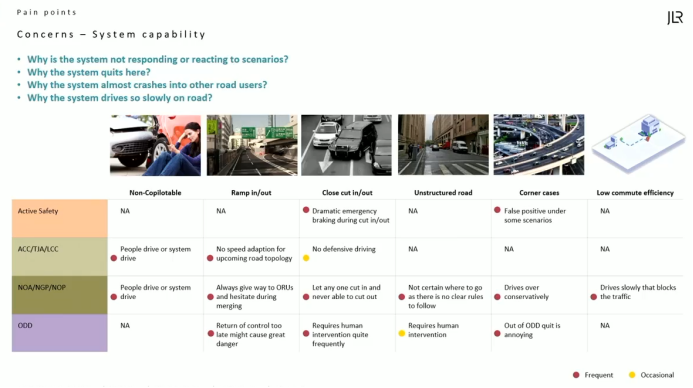 ˆDش´£؛رفضv¼خظeثط²ؤ جلةٌ{ٌ‚َwٍآ·ڈ½ خز‚ƒŒ¦سعبç؛خجلةٌ{ٌ‚†Tٌ{ٌ‚َwٍك@ز»†–î}سذضT¶àث¼؟¼،£خزŒ¢ئن·ضéژׂ€·½أو£¬·ض„eتاdefinition،¢design،¢baseline،¢implementation£¬close loop،£ دآˆDتاز»‚€·½·¨ص“£¬خز‚ƒصشع¸ْëSك@‚€·½·¨كMذذ¹¦ؤـŒسأوµؤ¶¨ءx£¬أûéKano Chart،£خز‚ƒ»ٍ¶à»ٍةظ¶¼•ث¼؟¼£¬ؤؤذ©¹¦ؤـتا±طيڑµؤ£¬ؤؤذ©¹¦ؤـتاسذءث¸ü؛أ،£ك@ڈˆˆDسزدآ½اث{ة«دَدقہïتا»ùµA¹¦ؤـ£¬ضذégتاperformance need£¬حùةدتاDelighters،£خز‚ƒز»ض±شعث¼؟¼بç؛خŒ¢آ·»¢µؤـ‡إcئنثûµحƒrـ‡×ِ³َِwٍةدµؤ…^·ض¶ب،£ 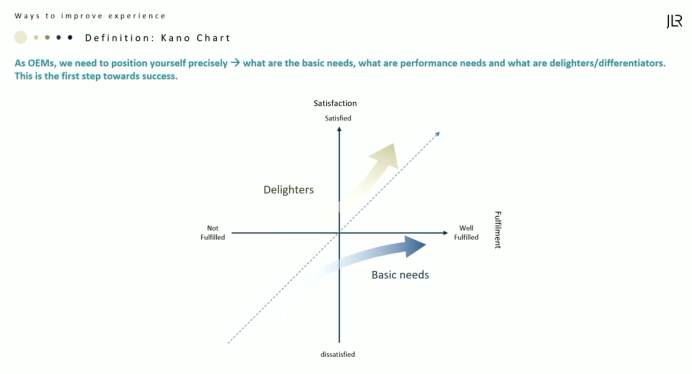 ˆDش´£؛رفضv¼خظeثط²ؤ ‡ّƒبض÷™CڈSµؤé_°l¹×àز»ض±±بب«اٍ؟ى£¬اذبëücسذثù²»ح¬،£‡ّƒب´َ¶à”µڈؤـ›¼اذب룬ëSضّدµ½yذèاَش½پيش½حêةئ£¬ـ›¼²»”àµü´ْ£¬ك@تاé_°l¸ü؟ىµؤشزٍ،£µ«ك@کس×ِحùحù•؛ِآشدµ½yا°¶ثSys1é_°l£¬Sys1تاسأ‘ôذèاَµؤتص¼¯،£ 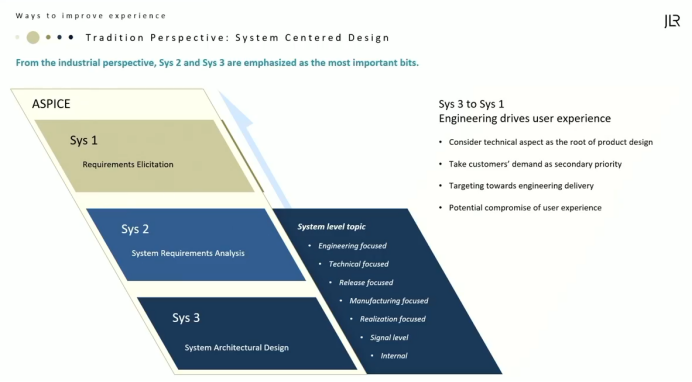 ˆDش´£؛رفضv¼خظeثط²ؤ خز‚ƒƒب²؟µؤé_°lتا¸ù“صدٍء÷³ج×ِµؤ£¬؛ـضطز•Sys1،£شعSys1é_°lك^³جضذزھ³ن·ض؟¼‘]سأ‘ôذèاَ،¢أ؟‚€¹¦ؤـزھك_µ½شُکسµؤؤ؟µؤ،£ك@ذ©ذèاَءذ³ِپي؛َآآحùدآ²ً½â×ِصدٍé_°l£¬ڈؤسأ‘ô½ا¶بث¼؟¼دµ½yµؤ†–î}،£ ´ثح⣬°²ب«†–î}تاذèزھضطücêP×¢µؤ،£ADASدµ½yشى³ِپي؛َز»¶¨زھؤـ‰ٍ½oٌ{ٌ‚†Tجل¹©¸ü°²ب«،¢سذƒrضµµؤ–|خ÷،£خز‚ƒصJé±£×C°²ب«ذèزھسذز»ذ©بكس࣬²»ƒHتاˆجذذئع£¬شع‚÷¸ذئ÷ةدز²زھسذز»¶¨µؤبكسà،£ Œ¦سعجط¶¨…^سٍ±ببçـ‡µؤا°·½£¬تاسةز»·N‚÷¸ذئ÷¸²ةwك€تاƒة·N‚÷¸ذئ÷،¢ب·N‚÷¸ذئ÷£¬¸ù“¼‰„eµؤ²»ح¬¶¨ءx•سذثù…^„e،£Œ¦سع¸ü¸ك¼‰„eµؤ×ش„سفoضٌْ{ٌ‚¶ّرش£¬ضءةظذèزھƒة·N‚÷¸ذئ÷£¬¸ü؛أµؤتاب·N‚÷¸ذئ÷،£´ثح⣬بç¹ûسذ؛ـ‡ہ¸ٌµؤœyش‡ء÷³ج£¬¹¦ؤـµؤئًüc¾ح²»•µح،£ 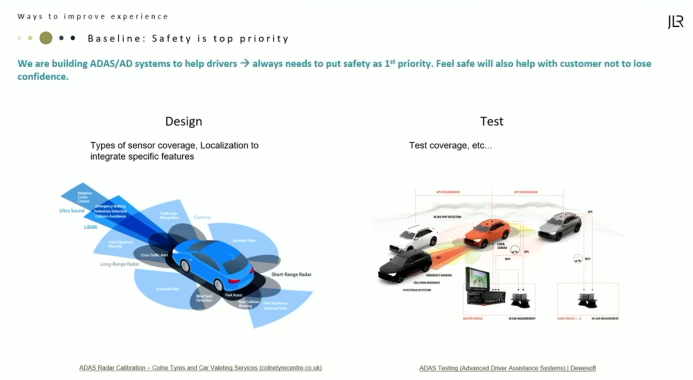 ˆDش´£؛رفضv¼خظeثط²ؤ ¼¼ذgµؤ²»”à°lص¹تاéءث׌َwٍ׃µأ¸ü؛أ،£ڈؤدآˆD؟ةزش؟´³ِ”zدٌî^‚€”µµؤشِéL£¬ڈؤ1‚€°lص¹³ة2‚€،¢6‚€،¢7‚€،¢11‚€£¬”zدٌî^ش½پيش½¶à£¬دٌثطش½پيش½¸ك£¬ك@Œ¢•تاز»‚€ع…„ف£¬ژحضْجلةَwٍ،£ءيح⣬سٍ؟طضئئ÷ضذµؤثمء¦أ؟¸ôƒةؤê•سذز»´خïwـS£¬¸ü¸كثمء¦µؤذ¾ئ¬•جلةضاؤـٌ{ٌ‚µؤَwٍ،£  ˆDش´£؛رفضv¼خظeثط²ؤ ءيح⣬بç؛خ×ِ…fح¬ز»ض±تا±بف^تـêP×¢µؤ†–î}،£…fح¬°üہ¨؟ç²؟éTµؤ…fح¬زش¼°²؟éTض®égµؤ…fح¬،£±ببç؛ـ¶àبثµؤـ‡ةدسذAI HUD£¬é_ـ‡µؤ•r؛ٍ•ï@ت¾Œ§؛½ذإد¢؛حـ‡ثظذإد¢،£ح£ـ‡µؤ•r؛ٍ¸ü¶à½çأو•ï@ت¾شعضذ؟طƒx±يإ_،¢ضذ؟طض÷™Cةد،£خز‚ƒ×î½üصشعث¼؟¼£¬ح£ـ‡µؤ•r؛ٍذèزھŒ¢ا°أو×ِ³ةشُکسؤـ‰ٍ½oسأ‘ôژ§پي¸ü؛أµؤَwٍ£¬؛َز•çRةدï@ت¾ت²أ´£¬بç؛خ×ِ¸ü؛أµؤ½â›Q·½°¸£¬ك@ئنضذةو¼°µ½OEMضذ´ٍé_²؟éT‰¦µؤ†–î}،£؟‚َw¶ّرش£¬زھدëجلةَwٍ£¬خز‚ƒذèزھ´ٍئئ¸ôéu£¬ز»ئً°رضاؤـٌ{ٌ‚صû‚€دµ½yµؤَwٍ×ِµأ¸ü؛أ،£إہةµؤêPوI¾حتا·eہغ”µ“،¢×ِـ›¼µü´ْ£¬Œ¢َwٍ×ِµأ¸ü؛أ،£ ؛أµؤٌ{ٌ‚َwٍ؟ةزشسأƒة‚€ش~ذخبف،£ز»تاseamless£¬سأ‘ô¸ذضھ²»µ½ك@ج×دµ½yشع؛َإ_ك\ذذ£¬ژحضْخز‚ƒجل¹©¸ü°²ب«توكmµؤذخ³ة،£µع¶‚€ش~تاjourney£¬ثü•إمضّؤمز»ئًحê³ةةددآ°àµؤآأ³ج،£زشةدتاخز‚ƒŒ¢پيؤ؟کث£¬ذèزھŒ¢ضاؤـٌ{ٌ‚دµ½y´ٍشى³ةك@کسµؤدµ½y£¬½oسأ‘ôژ§پي¸ü¶àƒrضµ،£ £¨زشةدƒببفپي×ش½ف±ھآ·»¢ضذ‡ّ×ش„سٌ{ٌ‚¼°ضاؤـفoضٌْ{ٌ‚¸±؟‚²أذد±َسع2023ؤê10شآ19بص-20بصشعµعت®ز»Œأئûـ‡إch¾³„“ذآص“‰¯ôكµعت®خهŒأب«اٍئûـ‡®aکI·ه•°l±يµؤ،¶ـ›¼¶¨ءxئûـ‡£¬َwٍ¶¨ءxضاؤـٌ{ٌ‚،·ض÷î}رفضv،££© |
 |
ضذ‡ّه‘‰؛¾W¹ظ·½خ¢ذإ£؛’كز»’ك£¬ء¢¼´êP×¢£،
êP×¢"ضذ‡ّه‘‰؛¾W"£¬«@ب،ھڑ¼زذذکIذآآ„ظYسچ،£ جي¼س·½·¨1£؛ شع،°جي¼س؛أسر،±ضذض±½سجي¼سخ¢ذإظ~ج–£؛chinaforge جي¼س·½·¨2£؛ خ¢ذإضذ’كأè×َ‚بµؤ¶¾S´a |